Learning Objectives
- Recognize factors contributing to DR vessel location “inaccuracy.”
- Comprehend what a line of position (LOP) is.
- Understand steering error
- Define Leeway
- Describe Set and Drift.
- Explain Course Made Good and Speed Made Good.
- Establish an estimated position using DR and a single line of position.
- Resolve set and drift by comparing a DR position with a Fix.
- Determine course to steer to compensate for known set and drift.
Factors contributing to location inaccuracies
A navigator must always keep a running DR plot. As discussed in the lesson on Dead Reckoning a DR position should be updated and plotted at a minimum of hourly and at any speed or course change.
While every effort is made for accuracy, there are a number of factors that might contribute to inaccuracy of a DR position.
- Wind – The leeward motion of a vessel due to wind is known as leeway. A wind blowing from port with case the vessel to move to starboard of the intended track. The angular difference between a vessel’s course and the track due to the effect of wind is known as leeway angle.
- Steering Error – Failure to hold the desired course is steering error. The underlying cause of steering error might be deviation changes in the vessel’s steering compass, the impact of sea conditions on keeping a stable course, or inattention on the part of the helms-person.
- Current – As a vessel moves through the water, it moves “off course” in the direction of and at the speed of currents in the water. The direction of current flow is known as set. Speed of the current is drift.
Factors contributing to location inaccuracy may cancel each other out. For example leeway from a wind on the port side might be canceled out by current coming from starboard. Unfortunately, they can just as easily be cumulative with wind from port and current from port adding together to push you far right of your intended course.
Set and Drift
Changes in movement of a vessel’s intended course due to current are known as set and drift. Again, set is the direction of movement. This direction is marked on the chart using a 3 digit compass direction the current is moving toward. Always plot set using degrees true. Drift is the speed of movement. Another way to say it is; the distance traveled in nautical miles in one hour. When set and drift are known, an estimated position must be plotted with each DR position.
Estimated Position
A DR plot is based solely on course, speed, time, and distance. When any other factors are introduced, the established position is referred to as an estimated position. More detailed information can be found in the Estimated Position lesson.
In practice, how set and drift are plotted depends on two things. First, are the set and drift unknown, or known before starting out? Second, if known, do you as the navigator want to plot the EP as an integral part of the DR plot, or to add the DR position after the DR location is plotted. Examples of each option are provided below.
Unknown set and drift
It goes without saying, if set and drift are unknown simply plot a normal DR position. When at some point in the future you establish a position fix, set and drift can be calculated. Assuming your fix is different than the DR position, simply draw a vector from the DR position to the Fix. The direction of the vector is your set. The length represents drift over “total time”. Make sure to convert drift to a one hour time span.
Known set and drift
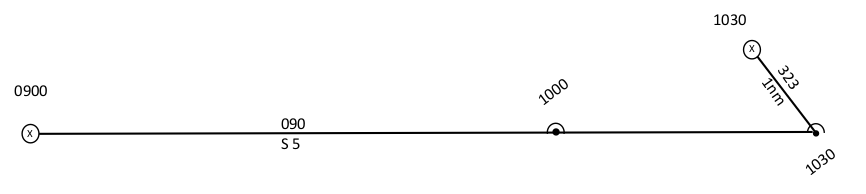
While generally dead reckoning incorporates only course and speed into the plot, there is one major exception to this rule. When dealing with a known current, the set and drift may be built into the plot. The resulting DR position is in effect an estimated position, however, it typically not labeled separately.
In the illustration below, the scenario is the same as the previous one. The helm is steering a course of 090 at 5 kts. However, in this case the navigator knows there is a set of 323 @ .7 kts. The resulting course made good is 083. The speed over ground is 4.6 kts.
Unfortunately, it can be challenging to do a DR plot this way, especially if there are course and/or speed changes along the way. Essentially, the navigator has to do a separate plot using a plotting sheet to determine course made good and speed made good for each leg of the voyage before plotting the leg. Imagine a sailboat trying to sail to windward, making a tack every 30 minutes. Trying to calculate course made good and speed over ground for each leg would be a challenge at best, and a nightmare at worst. It is much easier to do a normal DR plot, and then apply known set and drift to the ending DR position.
Correcting for set and drift – determining course to steer
Back to our first example. The course made good will be substantially North of desired if set and drift are not compensated. Obviously, steering somewhat South of your desired course will put you on the proper course. The question is how much.
One-hour vector triangle
Use a one-hour vector triangle to calculate course to steer. A one-hour vector triangle may be completed directly on the chart or by using a separate plotting sheet as long as accurate directions and distances can be marked. A Maneuvering Board is used for this example.
Course to steer example
Assume the following
- Desired Course 090T
- Estimated Vessel Speed 5 knots
- Set 323T
- Drift .7 knots
Steps – refer to the illustration below
- Beginning at the vessel’s starting position (A) draw a vector representing the desired course, extending the line to point B, well past the distance to be travelled in one hour. Line AB represents the desired Track Made Good.
- From point A draw a vector the direction and length of the set and drift ending at point C
- Using point C as the center, strike an arc the distance traveled in one hour. The point the arc crosses line AB becomes point D
- The course to steer is the direction represented by line CD (096)
- The estimated Speed Made Good is the length of line AD (4.5 kts)